一般的な意味でのセンサーは、ある物理量を別の物理量に変換するデバイスであり、処理、送信、またはその後の変換に便利です。原則として、最初の量は物理的であり、直接測定(温度、速度、変位など)には適していません。また、2番目の量は電気信号または光信号です。測定器の分野のニッチはセンサーで占められており、その主な要素はインダクターです。
インダクタンスセンサーのしくみとそのしくみ
動作原理によれば、誘導センサーはアクティブです。つまり、動作するには外部発電機が必要です。インダクタに特定の周波数と振幅の信号を提供します。
コイルのターンを通過する電流は磁場を生成します。導電性の物体が磁場に入ると、コイルのパラメータが変化します。この変更を修正するだけです。
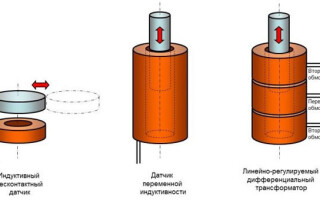
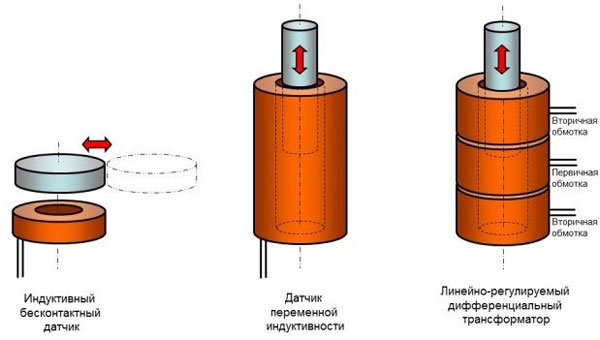
単純な非接触センサーは、巻線の近くのゾーンにある金属物体の出現に反応します。これによりコイルのインピーダンスが変化します。この変化を電気信号に変換し、比較回路を使用してしきい値の通過を増幅および(または)修正する必要があります。
別のタイプのセンサーは、コイルのコアとして機能するオブジェクトの縦方向の位置の変化に応答します。オブジェクトの位置が変わると、コイルの内外に移動し、インダクタンスが変化します。この変化を電気信号に変換して測定することができます。このようなセンサーの別のバージョンは、物体が外側からコイルに近づく場合です。これにより、地面効果によりインダクタンスが減少します。
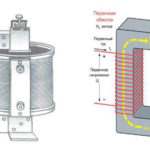
誘導変位センサーの別のバージョンは、線形調整可能な差動変圧器(LVDT)です。これは、次の順序で作成された複合コイルです。
- 二次巻線1;
- 一次巻線;
- 二次巻線2。
発電機からの信号は一次巻線に供給されます。中央のコイルによって生成された磁場は、各二次コイルにEMFを誘導します(変圧器の原理)。コアが動くと、コイル間の相互接続が変化し、各巻線の起電力が変化します。この変化は、測定回路によって修正できます。コアの長さは複合コイルの全長よりも短いため、オブジェクトの位置は、2次巻線のEMF比によって明確に決定できます。
同じ原理(巻線間の誘導結合の変化)に基づいて、ターンセンサーが構築されます。2つの同軸コイルで構成されています。信号は巻線の1つに適用され、2番目のEMFは相互の回転角に依存します。
動作原理から、誘導センサーは設計に関係なく非接触であることは明らかです。それらは離れた場所で機能し、制御対象と直接接触する必要はありません。
誘導センサーの長所と短所
誘導型センサーの利点は主に次のとおりです。
- 設計の信頼性;
- 接触接続の欠如;
- 高出力電力。ノイズの影響を低減し、制御回路を簡素化します。
- 高感度;
- 産業用周波数の交流電圧源から動作する能力。
誘導型センサーの主な欠点は、サイズ、重量、製造の複雑さです。所定のパラメータでコイルを巻くには、特別な装置が必要です。また、マスターオシレーターからの信号の振幅を正確に維持する必要性はマイナスと見なされます。それが変わると、感度の領域も変わります。センサーは交流のみで動作するため、振幅を維持することは技術的な問題になります。直接(または降圧変圧器を介して)センサーを家庭用または産業用ネットワークに接続することはできません-その場合、振幅または周波数の電圧変動は通常モードで10%に達することさえあり、測定精度が許容できないものになります。
また、測定精度は次の影響を受ける可能性があります。
- サードパーティの磁場(センサーの動作原理に基づいてセンサーのシールドは不可能です);
- 供給および測定ケーブルのサードパーティEMFピックアップ。
- 製造エラー;
- センサー特性エラー;
- 全体的なパフォーマンスに影響を与えない、センサー設置場所でのバックラッシュまたは変形。
- 精度の温度依存性(抵抗を含む巻線のパラメータが変化します)。
インダクタンスセンサーが磁場中の誘電体の出現に応答できないことは、長所と短所の両方に起因する可能性があります。一方では、これはそれらのアプリケーションの範囲を制限します。一方、監視対象物の汚れ、グリース、砂などの存在に鈍感になります。
誘導センサーの動作における欠点と考えられる制限についての知識は、それらの利点の合理的な使用を可能にします。
誘導センサーの範囲
誘導型近接センサーは、リミットスイッチとしてよく使用されます。このようなデバイスは広く普及しています。
- セキュリティシステムでは、窓やドアを不正に開くためのセンサーとして。
- 遠隔機械システムでは、ユニットとメカニズムの最終位置のセンサーとして。
- ドア、シャッターの閉位置を示すためのスキームの日常生活で;
- オブジェクトをカウントするため(たとえば、コンベヤーベルトに沿って移動するため)。
- 歯車の回転速度を決定する(センサーを通過する各歯がインパルスを生成する)。
- 他の状況では。

角度エンコーダは、絶対エンコーダだけでなく、シャフト、歯車、その他の回転コンポーネントの回転角度を決定するために使用できます。また、このようなデバイスは、線形位置センサーとともに工作機械やロボットデバイスで使用できます。メカニズムのノードの位置を正確に知る必要がある場合。
誘導センサーの実装の実際的な例
実際には、誘導センサーの設計はさまざまな方法で実装できます。最も単純な実行と包含は、感度ゾーン内の金属物体の存在を監視する2線式単一センサーの場合です。このようなデバイスは、多くの場合、E字型のコアに基づいて作成されますが、これは基本的なポイントではありません。このような実装は製造が容易です。
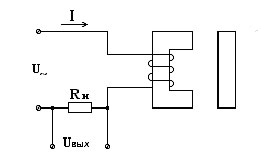
コイル抵抗が変化すると、回路内の電流と負荷両端の電圧降下が変化します。これらの変更はコミットできます。問題は、負荷抵抗が重要になることです。大きすぎると、金属物が現れたときの電流の変化が比較的小さくなります。これにより、システムの感度とノイズ耐性が低下します。小さい場合は回路の電流が大きくなり、より抵抗力のあるセンサーが必要になります。
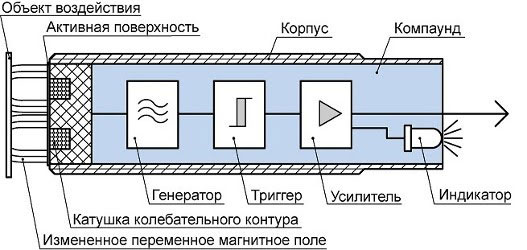
そのため、センサーハウジングに測定回路を内蔵した設計があります。ジェネレータは、インダクタに給電するパルスを生成します。特定のレベルに達すると、トリガーが起動し、状態0から1に、またはその逆に反転します。バッファアンプは、電力および(または)電圧の観点から信号を増幅し、LEDを点灯(消灯)し、離散信号を外部回路に出力します。
出力信号は次のように形成できます。
- 電磁気または ソリッドステートリレー –ゼロまたは1つの電圧レベル。
- "ドライコンタクト" 電磁リレー;
- オープンコレクター トランジスタ (構造n-p-nまたはp-n-p)。
この場合、センサーを接続するには3本のワイヤーが必要です。
- 食物;
- 普通線(0ボルト);
- 信号線。
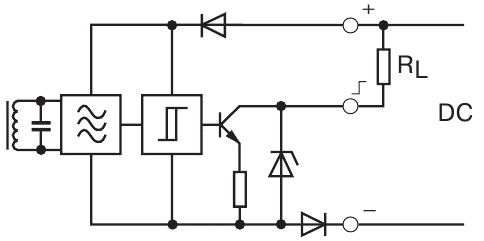
このようなセンサーは、DC電圧で電力を供給することもできます。それらが内部発生器によって形成されるインダクタンスへのパルス。
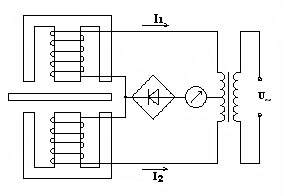
位置監視には差動エンコーダを使用します。制御対象が両方のコイルに対して対称である場合、それらを流れる電流は同じです。巻線がフィールドに向かってシフトすると、不均衡が発生し、合計電流はゼロに等しくなくなります。これは、スケールの中央にある矢印の付いたインジケータによって記録できます。インジケーターは、シフトの大きさとその方向の両方を決定するために使用できます。ポインティングデバイスの代わりに、位置の変化に関する情報を受信すると、信号を発し、オブジェクトを位置合わせするための対策を講じ、技術プロセスを調整するなどの制御スキームを使用できます。

線形調整可能な差動変圧器の原理に従って製造されたセンサーは、一次巻線と二次巻線を備えたフレームと内部を移動するロッド(バネ仕掛けが可能)である完全な構造の形で製造されます。発電機から信号を送信し、二次巻線からEMFを除去するために、ワイヤが引き出されます。制御対象物をロッドに機械的に取り付けることができます。誘電体で作ることもできます-測定にはステムの位置だけが重要です。
特定の固有の欠点にもかかわらず、誘導センサーは、宇宙の物体の非接触検出に関連する多くの領域を閉じます。技術の絶え間ない発展にもかかわらず、その操作は物理学の基本法則に基づいているので、このタイプのデバイスは、近い将来、測定デバイスの市場を離れることはありません。
同様の記事: