変調は非線形の電気的プロセスであり、ある信号(キャリア)のパラメータが別の信号(変調、情報)を使用して変更されます。通信技術では、周波数、振幅、および位相変調が広く使用されています。パワーエレクトロニクスおよびマイクロプロセッサ技術では、パルス幅変調が広く普及しています。
PWM(パルス幅変調)とは
元の信号のパルス幅変調では、元の信号の振幅、周波数、および位相は変化しません。矩形パルスの持続時間(幅)は、情報信号の作用により変化する可能性があります。英語の技術文献では、PWM(パルス幅変調)と省略されています。
PWMのしくみ
パルス幅変調信号は、次の2つの方法で形成されます。
- アナログ;
- デジタル。
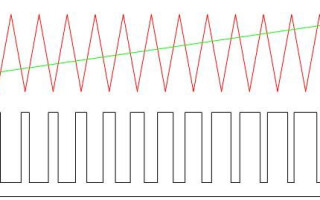
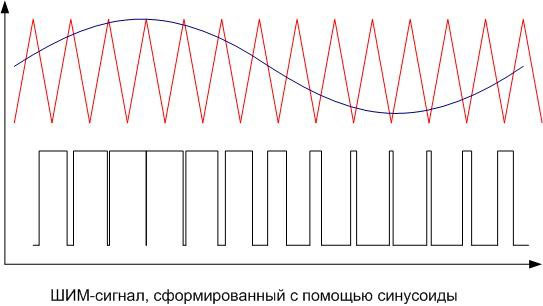
PWM信号を作成するアナログ方式では、のこぎり波または三角波信号の形式のキャリアが反転に供給されます コンパレータ入力、および情報-非反転について。瞬時キャリアレベルが変調信号よりも高い場合、コンパレータの出力はゼロですが、低い場合は1です。出力は、キャリアトライアングルまたはソーの周波数に対応する周波数と、変調電圧のレベルに比例するパルス長を持つ離散信号です。
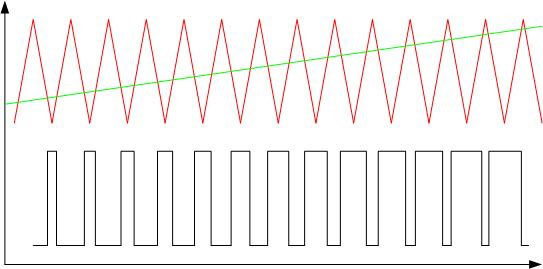
一例として、三角波信号のパルス幅変調は直線的に増加しています。出力パルスの持続時間は、出力信号のレベルに比例します。
アナログPWMコントローラは、コンパレータとキャリア生成回路が設置された既製のマイクロ回路の形でも入手できます。外部周波数設定素子を接続し、情報信号を供給するための入力があります。強力な外部キーを制御する信号が出力から削除されます。フィードバック用の入力もあります。これらは、設定された制御パラメーターを維持するために必要です。そのようなものは、例えば、TL494チップです。消費者の電力が比較的小さい場合は、キーが組み込まれたPWMコントローラーを使用できます。 LM2596マイクロ回路の内部キーは、最大3アンペアの電流用に設計されています。
デジタル方式は、特殊なマイクロ回路またはマイクロプロセッサを使用して実行されます。パルス長は内部プログラムによって制御されます。人気のあるPICやAVRを含む多くのマイクロコントローラーには、PWMを「オンボード」でハードウェア実装するためのモジュールが組み込まれています。PWM信号を受信するには、モジュールをアクティブにしてその動作パラメーターを設定する必要があります。そのようなモジュールが利用できない場合、PWMは純粋にソフトウェアで編成できます。これは難しくありません。この方法は、出力を柔軟に使用することでより多くの電力と自由度を提供しますが、より多くのコントローラーリソースを使用します。
PWM信号の特性
PWM信号の重要な特性は次のとおりです。
- 振幅(U);
- 頻度(f);
- デューティサイクル(S)またはデューティサイクルD。
ボルト単位の振幅は、負荷に応じて設定されます。消費者の定格供給電圧を提供する必要があります。
パルス幅によって変調される信号の周波数は、次の考慮事項から選択されます。
- 周波数が高いほど、制御精度が高くなります。
- 周波数は、PWMによって制御されるデバイスの応答時間より低くてはなりません。低くしないと、制御されたパラメータの顕著なリップルが発生します。
- 周波数が高いほど、スイッチング損失が大きくなります。これは、キーの切り替え時間が有限であるという事実から生じます。ロック状態では、キーエレメントのすべての電源電圧が低下しますが、電流はほとんどありません。開状態では、全負荷電流がキーを流れますが、スループット抵抗が数オームであるため、電圧降下は小さくなります。どちらの場合も、消費電力はごくわずかです。ある状態から別の状態への遷移は迅速に発生しますが、瞬時には発生しません。ロック解除-ロックの過程で、部分的に開いた要素に大きな電圧降下が発生すると同時に、大きな電流が流れます。このとき、消費電力は高い値に達します。この期間は短く、キーを大幅にウォームアップする時間がありません。しかし、単位時間あたりのこのような時間間隔の頻度が増えると、それはより多くなり、熱損失が増加します。したがって、キーを作成するには、高速な要素を使用することが重要です。
- 運転するとき 電気モーター 周波数は、人が聞こえる領域から取り除く必要があります-25kHz以上。より低いPWM周波数では、不快なホイッスルが発生するためです。
これらの要件はしばしば互いに矛盾しているため、場合によっては周波数の選択が妥協点になります。
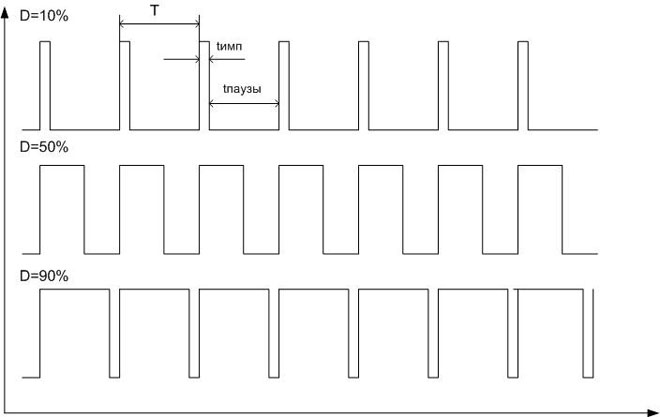
変調値はデューティサイクルを特徴づけます。パルス繰り返し率が一定であるため、周期の持続時間も一定です(T = 1 / f)。期間はインパルスと一時停止で構成され、それぞれ期間tがあります。インプ およびt一時停止、およびtインプ+ t一時停止=T。デューティサイクルは、パルス幅と周期の比率です-S \ u003d tインプ/T。しかし実際には、逆数の値を使用する方が便利であることがわかりました-曲線因子:D = 1 / S = T / tインプ。曲線因子をパーセンテージで表すとさらに便利です。
PWMとSIRの違いは何ですか
外国の技術文献では、パルス幅変調とパルス幅調整(PWR)の間に違いはありません。ロシアの専門家は、これらの概念を区別しようとしています。実際、PWMは一種の変調です。つまり、別の変調の影響下での搬送波信号の変化です。キャリア信号は情報のキャリアとして機能し、変調信号がこの情報を設定します。また、パルス幅調整は、PWMを使用した負荷モードの調整です。
PWMの理由と用途
パルス幅変調の原理は、 強力な非同期モーターのスピードコントローラー。この場合、調整可能な周波数変調信号(単相または三相)は、低電力の正弦波発生器によって生成され、アナログ方式で搬送波に重畳されます。出力はPWM信号であり、必要な電力のキーに供給されます。次に、結果として得られた一連のパルスを、たとえば単純なRC回路を介してローパスフィルターに通し、元の正弦波を選択します。または、それなしで行うこともできます。エンジンの慣性により、ろ過が自然に発生します。明らかに、搬送周波数が高いほど、出力波形は元の正弦波に近くなります。
自然な疑問が生じます-たとえば、ジェネレータの信号をすぐに増幅することが不可能なのはなぜですか? 強力なトランジスタを使用?線形モードで動作する調整要素は、負荷とキーの間で電力を再分配するためです。この場合、重要な要素にかなりの電力が浪費されます。強力な制御要素がキーモード(トリニスタ、トライアック、RGBTトランジスタ)で動作する場合、電力は時間の経過とともに分配されます。損失ははるかに低くなり、効率ははるかに高くなります。
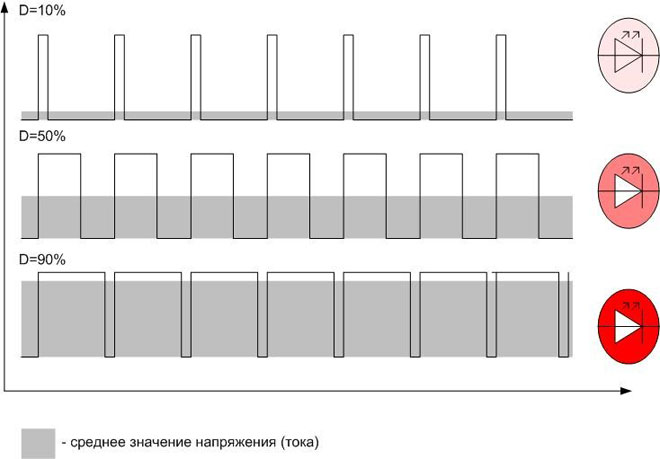
デジタル技術では、パルス幅調整に代わる特別な方法はありません。信号振幅はそこで一定であり、電圧と電流は、パルス幅に沿って搬送波を変調し、続いてそれを平均化することによってのみ変更できます。したがって、PWMは、パルス信号を平均化できるオブジェクトの電圧と電流を調整するために使用されます。平均化はさまざまな方法で行われます。
- 負荷慣性による。したがって、熱電ヒーターと白熱灯の熱慣性により、調整されたオブジェクトがパルス間の一時停止中に著しく冷却されないようになります。
- 知覚の慣性のため。 LEDにはパルスからパルスへと消える時間がありますが、人間の目はこれに気付かず、さまざまな強度の一定の輝きとして認識します。この原理は、LEDモニターのドットの明るさを制御するために使用されます。しかし、数百ヘルツの周波数で知覚できないまばたきがまだ存在し、眼精疲労を引き起こします。
- 機械的慣性による。このプロパティは、ブラシ付きDCモーターの制御に使用されます。正しく選択された調整周波数により、モーターはデッドポーズで減速する時間がありません。
したがって、PWMは、電圧または電流の平均値が決定的な役割を果たす場合に使用されます。上記の一般的なケースに加えて、PWM方式は、溶接機やバッテリー充電器などの平均電流を調整します。
自然な平均化が不可能な場合、多くの場合、この役割はすでに述べたローパスフィルター(LPF)RCチェーンの形で。実用上はこれで十分ですが、歪みのないローパスフィルタを使用してPWMから元の信号を分離することは不可能であることを理解する必要があります。結局のところ、PWMスペクトルには、必然的にフィルターの通過帯域に入る無限の数の高調波が含まれています。したがって、再構成された正弦波の形状について幻想を構築するべきではありません。
非常に効率的で効果的なPWMRGBLED制御。このデバイスには、赤、青、緑の3つのp-n接合があります。各チャンネルのグローの明るさを個別に変更することで、ほぼすべての色のLEDグローを取得できます(純白を除く)。 PWMを使用して照明効果を作成する可能性は無限大です。
パルス幅変調されたデジタル信号の最も一般的な用途は、負荷を流れる平均電流または電圧を制御することです。ただし、このタイプの変調を非標準で使用することも可能です。それはすべて開発者の想像力に依存します。
同様の記事: